
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/11110Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Iglesias Navarro, Iván | - |
| dc.contributor.author | Pomasque Moreta, Edison Darío | - |
| dc.date.accessioned | 2021-05-04T17:43:16Z | - |
| dc.date.available | 2021-05-04T17:43:16Z | - |
| dc.date.created | 2021-04-27 | - |
| dc.date.issued | 2021-05-04 | - |
| dc.identifier.other | 04/MEC/ 349 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/11110 | - |
| dc.description | Implementar dos estrategias control avanzado para el modelo de una órtesis de tobillo. | es_EC |
| dc.description.abstract | El presente proyecto detalla el diseño, aplicación y validación de dos modernas estrategias de control o control avanzado de una órtesis de tobillo para rehabilitación, las mismas que son capaces de controlar el movimiento del pie, durante cada una de las fases del ciclo de la marcha humana a velocidad normal. Estos métodos de control ajustan la posición angular, para que el tobillo se mantenga dentro de los rangos de movimiento al realizar una caminata normal. El sistema presentado junto con las estrategias de control implementadas, se puede aplicar en el diseño y construcción de órtesis de tobillo para rehabilitación. Para el diseño de estas estrategias de control se parte de la obtención de datos sobre la posición angular del tobillo durante la marcha, obteniendo una base de datos de un gran número de articulaciones. Con el software MATLAB se obtiene una señal promedio de diferentes muestras. Con el modelo mecánico y matemático llega a analizar la señal de salida con respecto a una referencia, de igual manera para verificar y analizar el diseño de controladores en base a la respuesta del sistema, mediante la calibración de ciertos parámetros, es posible obtener una señal de salida que es muy similar a la entrada, permitiendo el control de una órtesis de tobillo en un ciclo de marcha a velocidad normal. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | MECÁNICA | es_EC |
| dc.subject | ELECTRÓNICA | es_EC |
| dc.subject | REHABILITACIÓN MÉDICA | es_EC |
| dc.subject | ÓRTESIS DE TOBILLO | es_EC |
| dc.title | Sistemas de control avanzado para el modelo de una órtesis de tobillo | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra. Ecuador. | es_EC |
| dc.identifier.mfn | 0000033796 | es_EC |
| Appears in Collections: | Ing. en Mecatrónica | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEC 349 logo.jpg | Logo | 88.98 kB | JPEG | 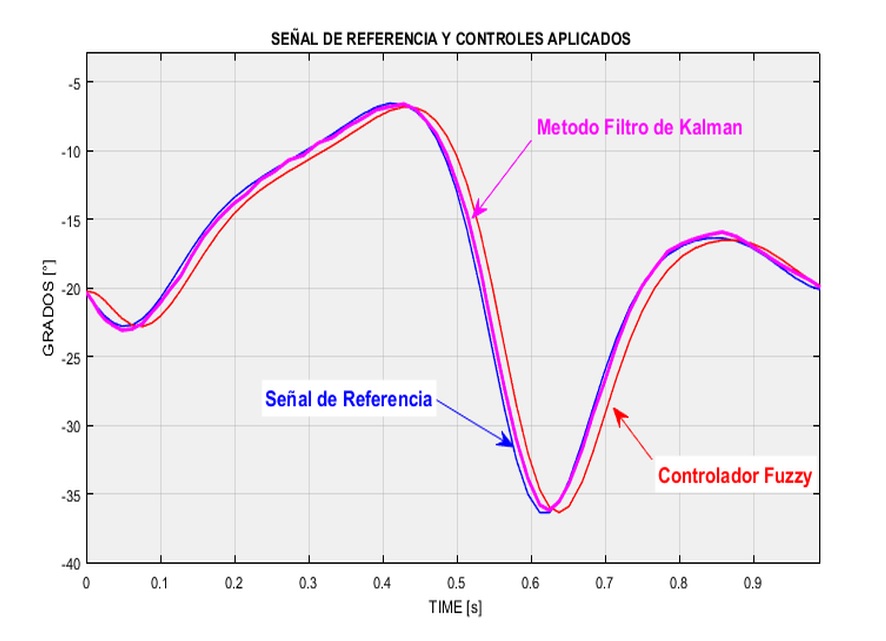 View/Open |
| 04 MEC 349 TRABAJO GRADO.pdf | Trabajo de Grado | 1.69 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

