
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/11281Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Iglesias Navarro, Iván | - |
| dc.contributor.author | López Pozo, Alejandro David | - |
| dc.date.accessioned | 2021-07-16T14:34:15Z | - |
| dc.date.available | 2021-07-16T14:34:15Z | - |
| dc.date.created | 2021-06-28 | - |
| dc.date.issued | 2021-07-16 | - |
| dc.identifier.other | 04/MEC/ 357 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/11281 | - |
| dc.description | Diseñar una interfaz gráfica para medición de ángulos de extremidades inferiores del cuerpo humano por medio de sensores inerciales. | es_EC |
| dc.description.abstract | En la actualidad existe la necesidad de nuevos sistemas de adquisición y procesamiento de datos angulares corporales, ya sea aplicado en la rehabilitación, detección de lesiones o estudio de movimiento, esto se evidencia como una necesidad cuando las herramientas usadas en este proceso son anticuadas o costosas, lo cual dificulta su uso cotidiano ya sea por falta de eficiencia o por la dificulta en la adquisición de nuevos sistemas. En el siguiente trabajo de grado se presenta el desarrollo una interfaz gráfica para medición de ángulos de extremidades inferiores del cuerpo humano por medio de sensores inerciales, dicha interfaz fue desarrollada en Python con la herramienta Tkinter, además de poseer las siguientes características: permite: el ingreso de múltiples registros, modificarlos, eliminarlos, también, permite la toma de datos angulares una pierna a la vez, con indicadores de estado dinámico de fácil comprensión. Todos los datos ingresados serán guardados en una base de datos PostgreSQL con un hostlocal, también permite graficar la señal de los datos obtenidas y realizar una simulación 2D, toda la programación se encuentra dividida por métodos con la finalidad de permitir que el programa pueda ser escalable, el software se centra en el estudio de la marcha humana. También se diseñó el sistema de adquisición de datos, el cual contiene 4 módulos inerciales, cuyo funcionamiento se basa en la toma de los datos del acelerómetro y giroscopio propiciados por el un sensor inercial para posteriormente ser procesados, dando como resultado ángulos de navegación del segmento de estudio, para posteriormente ser guardarlos y posteriormente transmitidos a un módulo maestro, cuya función consiste en realizar una conexión directa con cada módulo inercial, ya sea para autorizar el inicio de toma de muestras o para su recolección, dichas muestras son enviadas por medio de conexión serial a la interfaz la cual se encargará de su procesamiento, guardado y todas las funciones anteriormente nombradas. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | MECÁNICA | es_EC |
| dc.subject | ELECTRÓNICA | es_EC |
| dc.subject | INSTRUMENTOS DE MEDICIÓN | es_EC |
| dc.subject | EXTREMIDADES INFERIORES | es_EC |
| dc.title | Interfaz gráfica para medición de ángulos de extremidades inferiores del cuerpo humano por medio de sensores inerciales | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra. Ecuador. | es_EC |
| dc.identifier.mfn | 0000034811 | es_EC |
| Appears in Collections: | Ing. en Mecatrónica | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEC 357 logo.jpg | Logo | 86.84 kB | JPEG | 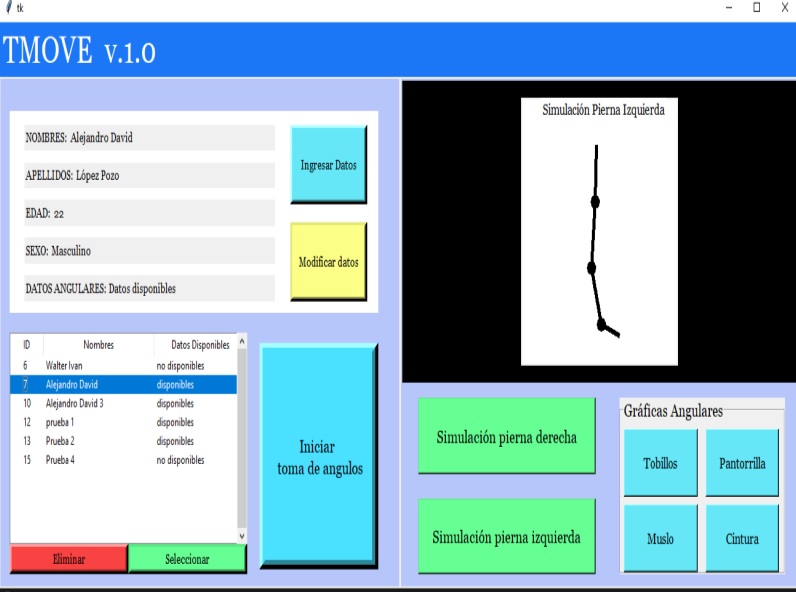 View/Open |
| 04 MEC 357 TRABAJO GRADO.pdf | Trabajo de Grado | 6.98 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

