
|
|
Por favor, use este identificador para citar o enlazar este ítem:
https://repositorio.utn.edu.ec/handle/123456789/11488Registro completo de metadatos
| Campo DC | Valor | Lengua/Idioma |
|---|---|---|
| dc.contributor.advisor | Rosero Chandi, Carlos Xavier | - |
| dc.contributor.author | Ortega Salas, Fausto Israel | - |
| dc.date.accessioned | 2021-09-17T17:57:10Z | - |
| dc.date.available | 2021-09-17T17:57:10Z | - |
| dc.date.created | 2021-08-20 | - |
| dc.date.issued | 2021-09-17 | - |
| dc.identifier.other | 04/MEC/ 380 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/11488 | - |
| dc.description | Diseñar un algoritmo para disminución de degradación del rendimiento en sistemas de control considerando actuación periódica | es_EC |
| dc.description.abstract | Los sistemas de control modernos son implementados en sistemas microprocesados que se desempeñan en tiempo real, ejecutando simultáneamente múltiples tareas. Esto provoca que el rendimiento de la acción de control pueda verse deteriorado por problemas conocidos como: Retardos en los tiempos de muestreo/actuación, latencias de entrada/salida y la incertidumbre provocada por el ruido en el sistema. Como resultado, la acción de control es propensa a la degradación de su rendimiento y no cumple con la demanda de periodicidad. Existen trabajos realizados para enfrentar esta problemática, pero estos requieren que los retardos de control sean constantes. Estos requerimientos se vuelven difíciles de conseguir debido a la latencia existente entre la entrada y salida, además del ruido en el sistema. Contribuyendo a esta problemática se presenta un algoritmo de control, el cual basa su funcionamiento en la sincronización de los instantes de actuación para afrontar los retardos de tiempos y las latencias existentes entre la entrada y salida. Además, incorpora al modelo un filtro de Kalman para reducir la incertidumbre provocada por el ruido en el sistema. Los resultados obtenidos en las simulaciones confirman que el modelo propuesto presenta un rendimiento adecuado, frente a otros modelos de control. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | ALGORITMO | es_EC |
| dc.subject | MECATRÓNICA | es_EC |
| dc.title | Algoritmo para disminución de degradación del rendimiento en sistemas de control con actuación periódica | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra. Ecuador | es_EC |
| dc.identifier.mfn | 0000035282 | es_EC |
| Aparece en las colecciones: | Ing. en Mecatrónica | |
Ficheros en este ítem:
| Fichero | Descripción | Tamaño | Formato | |
|---|---|---|---|---|
| 04 MEC 380 LOGO.jpg | LOGO | 53.65 kB | JPEG | 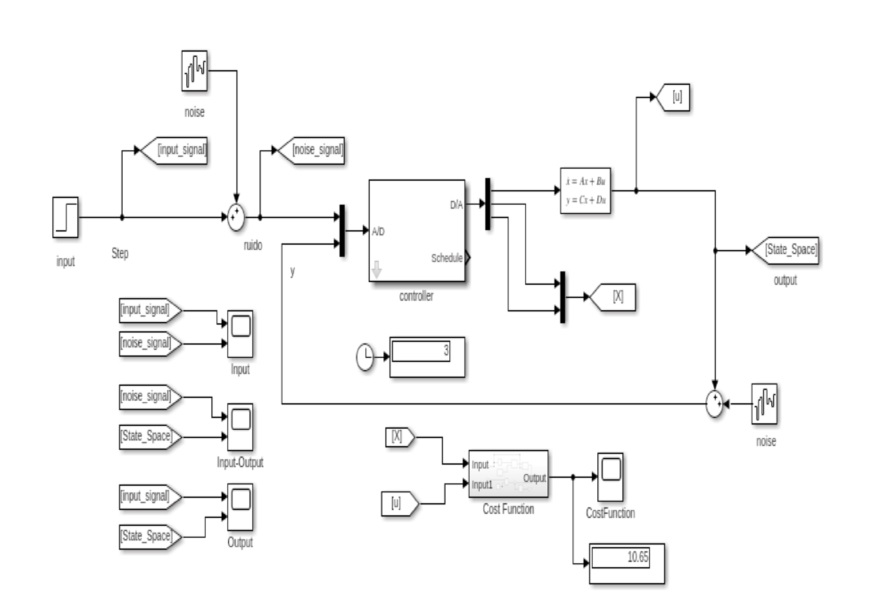 Visualizar/Abrir |
| 04 MEC 380 TESIS.pdf | TRABAJO DE GRADO | 1.35 MB | Adobe PDF |  Visualizar/Abrir |
Este ítem está protegido por copyright original |
Este ítem está sujeto a una licencia Creative Commons Licencia Creative Commons

