
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/11570Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Rosero Chandi, Carlos Xavier | - |
| dc.contributor.author | Morales Fonte, Ana Lucía | - |
| dc.date.accessioned | 2021-10-15T19:50:32Z | - |
| dc.date.available | 2021-10-15T19:50:32Z | - |
| dc.date.created | 2021-10-05 | - |
| dc.date.issued | 2021-10-15 | - |
| dc.identifier.other | 04/MEC/ 389 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/11570 | - |
| dc.description | Ajustar la ubicación en datos de posicionamiento global sobre mapas satelitales | es_EC |
| dc.description.abstract | Sin duda la geolocalización se ha convertido en un tema recurrente en la actualidad, en el transporte ha tenido una especial acogida, para entregas en lugares específicos, optimizar tiempos, etc. El servicio más conocido es el Sistema de Posicionamiento Global (GPS), que permite ubicar un objeto, lugar o persona en cualquier parte del mundo, este varía su resultado dependiendo del dispositivo en el que sea utilizado. El mapa que muestra el GPS delimita los sectores transitables, sin embargo, al ir en un vehículo existen intervalos de tiempo que muestra datos inexactos, es decir, coloca la ubicación sobre edificios, aceras, parques, etc. ´ Esto puede pasar por diversos factores como la señal, el receptor, el rendimiento del dispositivo y=o la densidad de edificaciones, estructuras o fauna en la que se esté transitando. A lo largo de los años el estudio para disminuir dicho error ha llevado a diversas soluciones, desde las más complejas hasta las más sencillas, dependiendo el momento que se decida trabajar con los datos, es decir durante la toma de estos o después de ser obtenidos. Las aplicaciones basadas en algoritmos matemáticos es una de las soluciones para mitigar el error siempre que los datos ya estén previamente obtenidos, además se hace uso de un mapa de referencia cuyos datos se pueden adquirir por distintos medios. El presente trabajo ofrece una un algoritmo matemático que permite trabajar con datos previamente obtenidos y un mapa de referencia segmentado de acuerdo con la geografía de la zona a trabajar. El algoritmo consta de dos partes que se aplican consecutivamente, empieza con la toma de datos mediante un dispositivo GPS, en zonas con redondeles, calles con un ángulo entre ellas, rectas y mixtas, en la primera parte se evalúan los valores con cada uno de los segmentos del mapa de referencia, la clasificación de los datos al segmento que corresponden se realiza con una comparación de proximidad, para posteriormente en la segunda parte del algoritmo, ser ubicados en el segmento correspondiente. Cabe recalcar que antes de trabajar con los datos es necesario cambiar su formato de coordenadas geográficas a coordenadas UTM para trabajar los algoritmos. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | TRANSPORTE | es_EC |
| dc.subject | GPS | es_EC |
| dc.subject | UBICACIÓN GEOGRÁFICA | es_EC |
| dc.title | Ajuste de ubicación en datos de posicionamiento global | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra. Ecuador | es_EC |
| dc.identifier.mfn | 0000035618 | es_EC |
| Appears in Collections: | Ing. en Mecatrónica | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEC 389 LOGO.jpg | LOGO | 45.14 kB | JPEG | 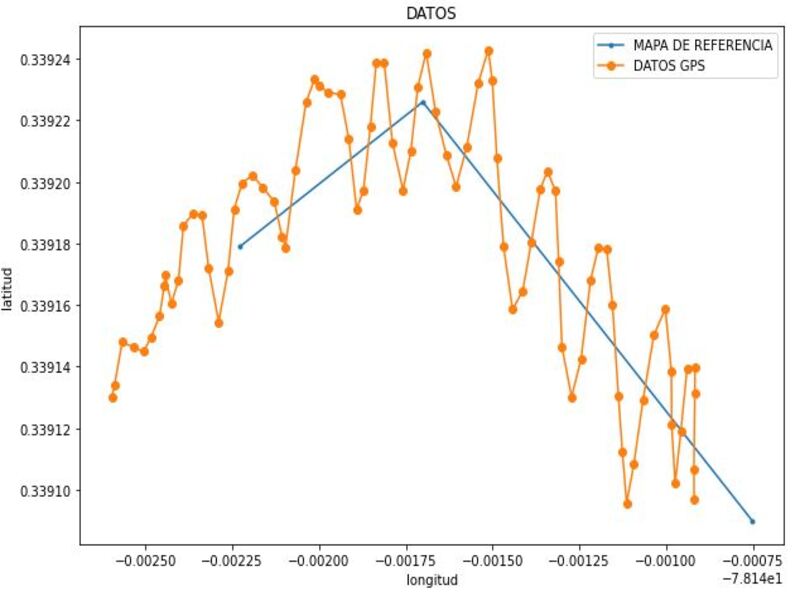 View/Open |
| 04 MEC 389 TRABAJO DE GRADO.pdf | TRABAJO DE GRADO | 1.93 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

