
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/12758Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Puma Benavides, David Sebastián | - |
| dc.contributor.author | Rosero Jaramillo, Francisco Xavier | - |
| dc.date.accessioned | 2022-08-15T13:59:35Z | - |
| dc.date.available | 2022-08-15T13:59:35Z | - |
| dc.date.created | 2022-07-28 | - |
| dc.date.issued | 2022-08-15 | - |
| dc.identifier.other | 04/MEC/ 436 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/12758 | - |
| dc.description | Modelar y simular un tren motriz adaptable para un chasis con perfil tubular para un vehículo eléctrico monoplaza utilitario tipo NEV para uso urbano de personas parapléjicas haciendo uso de herramientas computacionales para su correcta ejecución. | es_EC |
| dc.description.abstract | El objetivo principal del presente trabajo trata de modelar y simular un tren motriz que estará destinado para una posterior implementación en un chasis con perfil tubular de un vehículo eléctrico monoplaza tipo NEV de uso urbano para personas parapléjicas. Se inició con la investigación teórica con las diferentes metodologías y definir así el tren motriz, de potencia o de propulsión eléctrico. La herramienta computacional a elección fue el software MATLAB®/Simulink®, para el modelamiento y simulación se basó en el modelo vehicular backward facing. Se realizó el cálculo matemático de la dinámica longitudinal con mediciones específicas del vehículo, con un coeficiente de arrastre de C_d=0,67, área frontal A=2,122 m^2, pendiente máxima de 15º equivalente al 26,795 %, radio dinámico del neumático igual a r=0,282 m, relación de la caja de cambios e_j=1, relación del diferencial e_d=1 y una masa de m=325 kg incluido el ocupante. Se empleó el ciclo de manejo Modo 10 japonés limitado a una velocidad máxima de 35 km/h y sus parámetros para calcular todas las fuerzas y potencias necesarias para el vehículo. Se analizaron los resultados de la simulación proporcionando datos que permitieron seleccionar los componentes adecuados para el tren motriz, este consta de dos motores de cubo en rueda hub motor de 2 kW y de eficiencia 0,84 cada uno para tracción trasera con sus respectivos controladores, batería de litio de 74 V y capacidad nominal de 30 A-h. El sistema carece de elementos mecánicos como diferenciales o caja de cambios permitiendo aligerar el peso obteniéndose una autonomía cercana a 40 km con 65 ciclos repetitivos del ciclo de manejo utilizado con un consumo energético del 66,19 % y un porcentaje de energía sobrante del 33,81 % como respuesta del SOC, esto sin sistema de freno regenerativo. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | PARAPLEJÍA | es_EC |
| dc.subject | VEHÍCULOS ELÉCTRICOS | es_EC |
| dc.subject | MÉTODOS DE SIMULACIÓN | es_EC |
| dc.title | Modelación y simulación de un tren motriz para chasis tubular de un vehículo eléctrico monoplaza tipo Nev para personas parapléjicas | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra, Ecuador | es_EC |
| dc.identifier.mfn | 0000039515 | es_EC |
| Appears in Collections: | Ing. en Mecatrónica | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEC 436 logo.jpg | Logo | 128.93 kB | JPEG | 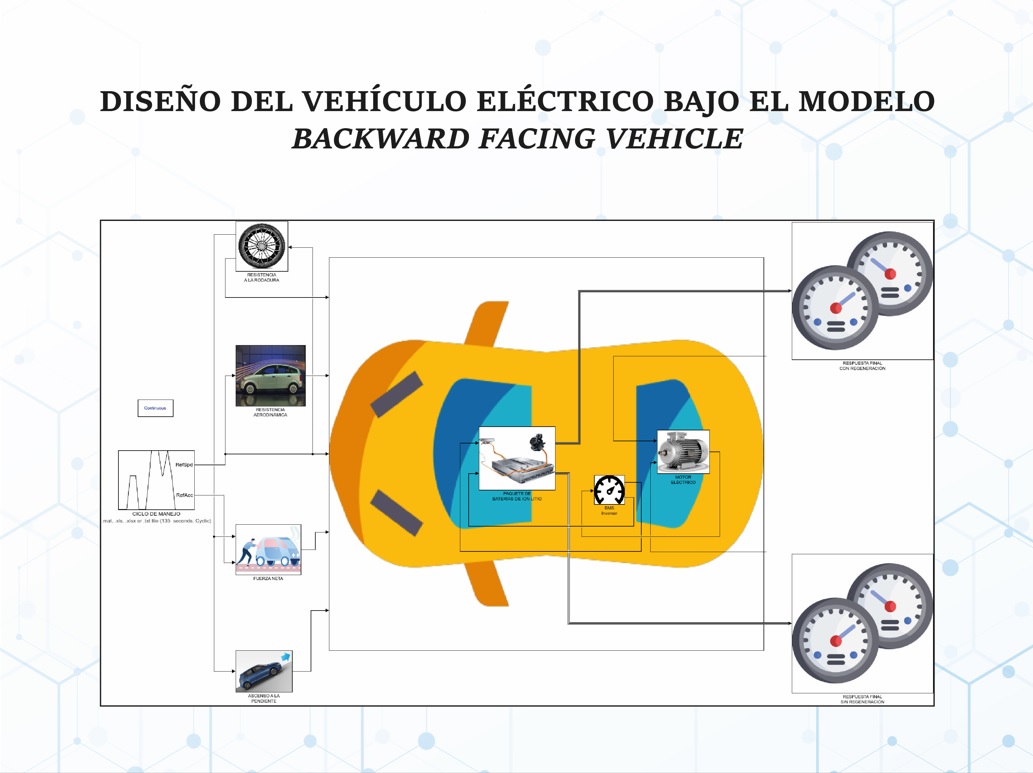 View/Open |
| 04 MEC 436 TRABAJO DE GRADO.pdf | Trabajo de grado | 3.56 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

