
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/13123Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Tobar Subía Contento, Luz María | - |
| dc.contributor.author | Lechón Matango, Silvia Janeth | - |
| dc.date.accessioned | 2022-10-28T20:20:02Z | - |
| dc.date.available | 2022-10-28T20:20:02Z | - |
| dc.date.created | 2022-10-14 | - |
| dc.date.issued | 2022-10-28 | - |
| dc.identifier.other | 04/MEC/ 447 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/13123 | - |
| dc.description | Optimizar el diseño mecatrónico de un gripper tipo garra de 2 dedos para mejorar las condiciones del agarre firme de objetos. | es_EC |
| dc.description.abstract | La tecnología conforme pasa los años ha tenido grandes adelantos, donde los procesos industriales que antes eran ejecutados por humanos, ahora son desarrollados por robots. Acorde al progreso y el aumento del uso de brazos robóticos en la industria, el diseño de grippers juega un papel importe en el agarre y manipulación de elementos. En este trabajo se presenta la optimización del diseño mecatrónico de un gripper tipo garra de dos dedos, el cual consiste en la recopilación de información para conocer las diferentes características y parámetros que interviene en el agarre estable de objetos. Se establece los elementos primordiales con base a la investigación y se diseña el gripper en un software CAD realizando los cálculos y simulaciones para garantizar que el diseño sea funcional. A su vez se desarrolla un prototipo utilizando la impresión 3D para evaluar la funcionalidad y se plantea el diseño CAD como resultado. Diseñar el modelo del gripper en un software CAD permite visualizar de manera más clara la correcta funcionalidad de los diferentes modelos ayudando a identificar aspectos que pueden presentar dificultades y generar mejoras que favorezcan a un mejor desempeño y funcionalidad. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | MECATRÓNICA | es_EC |
| dc.subject | SISTEMA ELECTRÓNICO | es_EC |
| dc.subject | TECNOLOGÍA | es_EC |
| dc.title | Optimización del diseño mecatrónico de un Gipper tipo garra de dos dedos | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra, Ecuador | es_EC |
| dc.identifier.mfn | 0000040134 | es_EC |
| Appears in Collections: | Ing. en Mecatrónica | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEC 447 LOGO.jpg | Logo | 118.07 kB | JPEG | 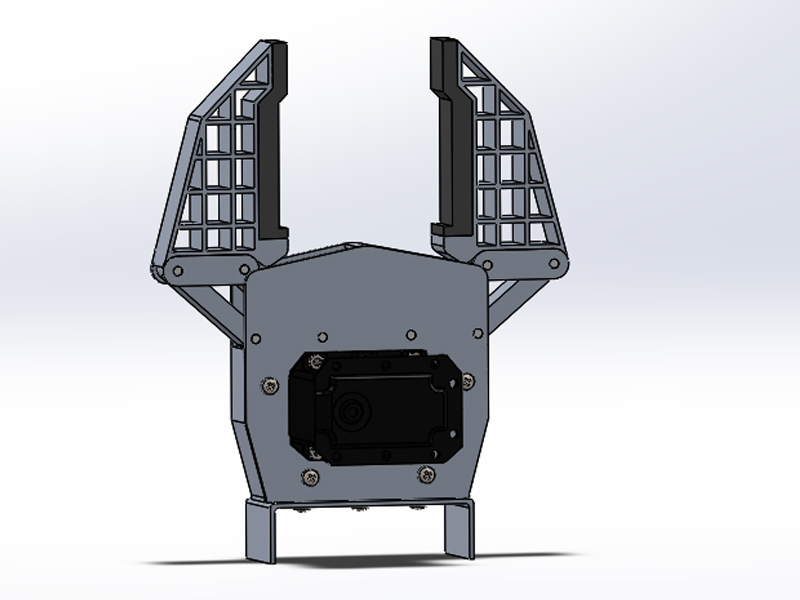 View/Open |
| 04 MEC 447 TRABAJO DE GRADO.pdf | Trabajo de grado | 2.22 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

