
|
|
Por favor, use este identificador para citar o enlazar este ítem:
https://repositorio.utn.edu.ec/handle/123456789/14066Registro completo de metadatos
| Campo DC | Valor | Lengua/Idioma |
|---|---|---|
| dc.contributor.advisor | Collaguazo Galeano, Gerardo Isaías | - |
| dc.contributor.author | Toro Alvarracín, Richard David | - |
| dc.date.accessioned | 2023-06-14T20:26:30Z | - |
| dc.date.available | 2023-06-14T20:26:30Z | - |
| dc.date.created | 2023-05-29 | - |
| dc.date.issued | 2023-06-14 | - |
| dc.identifier.other | 04/IEL/ 001 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/14066 | - |
| dc.description | Implementar un control LQR y un control Sliding en un convertidor Boost para el análisis del comportamiento de cada control aplicado al convertidor mediante el diseño y simulación del convertidor y los controles. | es_EC |
| dc.description.abstract | Se conoce que al elevar el voltaje del convertidor Boost al más alto, es propenso a ser demasiado sensible, asimismo, es inestable por ser un sistema de fase no mínima, por esta razón, al diseñar este tipo de convertidor se debe escoger la eficiencia que se ajuste a los parámetros de diseño y construcción, siendo para el caso de simulación una potencia nominal de 240 W, con un voltaje de entrada de 24 V y uno de salida de 48 V. Dentro de la problemática planteada, se expone la descripción de diferentes tipos de convertidores CC- CC, así como conceptos sobre los controles lineales y no lineales para tener una idea previa acerca de cuál es el control que mejor se adapte a las necesidades del convertidor, por ello es que se describe cada una de las características del control Regulador Cuadrático Lineal y del control de Modos Deslizantes. Después de haber caracterizado al sistema, se realiza un análisis y diseño del convertidor, se hace el cálculo teórico de los componentes y se escoge los valores comerciales para la implementación, se diseñan además los controles mencionados. Se especifica como determinar las funciones de transferencia más relevantes en el estudio dinámico. Además, se hacen simulaciones del convertidor colocando perturbaciones y cambios de referencia para así saber si los controles logran estabilizar la respuesta del convertidor y evitar la generación de fluctuaciones en el voltaje de salida. Finalmente, se exponen los resultados experimentales obtenidos a partir del prototipo construido. En estos resultados se hace especial mención en el rendimiento obtenido y del sistema de control ante cambios de referencia y perturbaciones de entrada y carga. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | REGULADOR CUADRÁTICO LINEAL | es_EC |
| dc.subject | VOLTAJE | es_EC |
| dc.subject | CIRCUITOS ELÉCTRICOS | es_EC |
| dc.subject | CONTROL LQR | es_EC |
| dc.title | Implementación de un control LQR y un control sliding aplicados a un convertidor boost | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mantenimiento Eléctrico | es_EC |
| dc.coverage | Ibarra. Ecuador | es_EC |
| dc.identifier.mfn | 0000041201 | es_EC |
| Aparece en las colecciones: | Ing. en Mantenimiento Eléctrico | |
Ficheros en este ítem:
| Fichero | Descripción | Tamaño | Formato | |
|---|---|---|---|---|
| 04 IEL 001 logo.jpg | Logo | 105.9 kB | JPEG | 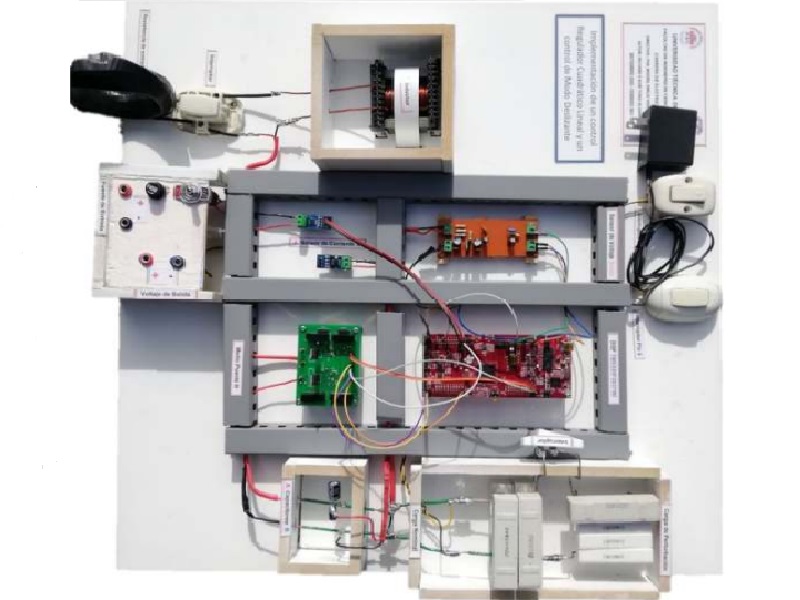 Visualizar/Abrir |
| 04 IEL 001 TRABAJO DE GRADO.pdf | Trabajo de Grado | 6.26 MB | Adobe PDF |  Visualizar/Abrir |
Este ítem está protegido por copyright original |
Este ítem está sujeto a una licencia Creative Commons Licencia Creative Commons

