
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/14600Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Rosero Chandi, Carlos Xavier | - |
| dc.contributor.author | Cedeño Pujota, Santiago Xavier | - |
| dc.date.accessioned | 2023-08-07T17:37:56Z | - |
| dc.date.available | 2023-08-07T17:37:56Z | - |
| dc.date.created | 2023-07-21 | - |
| dc.date.issued | 2023-08-07 | - |
| dc.identifier.other | 04/MEC/ 487 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/14600 | - |
| dc.description | Desarrollar un robot de batalla para participaci´on en la categor´ıa de 3 libras. | es_EC |
| dc.description.abstract | El trabajo se centra en el diseño, construcción en y evaluación en de un robot de batalla de 3 lb. Sellaba a cabo un análisis exhaustivo sobre las competencias de batalla de robots y se identifican los requisitos clave como velocidad, fuerza y resistencia, así como la duración de batería y el consumo de energía eficiente de acuerdo a los reglamentos de competición. El diseño del robot considera los aspectos antes mencionados, asegurando una estructura mecánica robusta y un sistema de control eficaz. Se realizan pruebas de simulación para optimizar su rendimiento y se implementan algoritmos de control para maximizar su efectividad en combate. Además, se desarrolla una interfaz de usuario en MIT App Inventor para permitir al operador controlar el robot y recibir información del estado de baterías en tiempo real. El trabajo concluye con la evaluación del desempeño del robot en ambientes controlados, siendo apto para enfrentarse a otros robots en un entorno desafiante y superar diversos retos. Los resultados obtenidos demuestran el ´éxito del dice ~no y la efectividad del robot de batalla. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | ELECTRÓNICA | es_EC |
| dc.subject | ROBÓTICA | es_EC |
| dc.subject | ROBOTS | es_EC |
| dc.title | Robot de batalla de bajo peso | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra. Ecuador. | es_EC |
| dc.identifier.mfn | 0000041635 | es_EC |
| Appears in Collections: | Ing. en Mecatrónica | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEC 487 logo.jpg | Logo | 21.6 kB | JPEG | 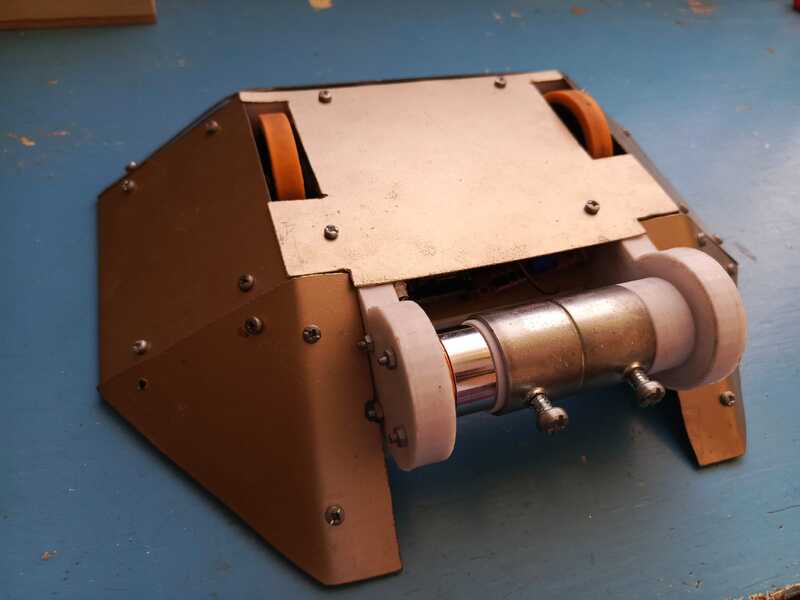 View/Open |
| 04 MEC 487 TRABAJO GRADO.pdf | Trabajo de Grado | 8.49 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

