
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/14602Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Gámez Aparicio, Brizeida Nohemí | - |
| dc.contributor.author | Vera Ramírez, Henry David | - |
| dc.date.accessioned | 2023-08-07T17:57:49Z | - |
| dc.date.available | 2023-08-07T17:57:49Z | - |
| dc.date.created | 2023-07-05 | - |
| dc.date.issued | 2023-08-07 | - |
| dc.identifier.other | 04/MEC/ 489 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/14602 | - |
| dc.description | Construir un exoesqueleto para terapias de rehabilitación de la extremidad superior derecha, dirigido a pacientes infantes con parálisis cerebral. | es_EC |
| dc.description.abstract | Se presenta el diseño y construcción de un exoesqueleto orientado a la rehabilitación del a extremidad superior derecha, de un paciente con hemiparesia, que le permitirá un movimiento activo continuo. Para el desarrollo del diseño se planteados posibles soluciones, tomando en cuenta las diferentes especificaciones que sirvieron para seleccionar la mejor alternativa. Posteriormente, se procede a realizar un análisis numérico, empleando SolidWorks 2021, con el propósito de obtenerlos desplazamientos que realizará el dispositivo en su operación normal; así como los esfuerzos a los cuales estará sujeto el dispositivo, a partir del sistema de cargas impuestas. Así mismo, se determinan los factores de seguridad de cada uno de los elementos estructurales del dispositivo. Adicionalmente, se realizaron los cálculos necesarios para la selección de los elementos electrónicos necesarios, acoplándose a la solución obtenida anteriormente y tomando en cuenta la disponibilidad en el mercado. La construcción del dispositivo se realizó empleando técnicas de impresión 3D, utilizando material PLA.Unmicrocontrolador Arduino es el encargado decontrolar los servomotores MG996R que, por medio de pulsadores, otorgarán el movimiento al mecanismo; además de diversos elementos electrónicos necesarios para el funcionamiento adecuado en conjunto. Finalmente, se obtuvo un dispositivo ergonómico, basado en las medidas antropométricas del paciente, el cual pesa 850g, que permite realizarlos movimientos de flexión y extensión de los dedos de la mano y de la articulación de codo. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | REHABILITACIÓN MÉDICA | es_EC |
| dc.subject | EXOESQUELETO | es_EC |
| dc.subject | MICROPROCESADOR | es_EC |
| dc.subject | INGENIERÍA | es_EC |
| dc.title | Exoesqueleto pediátrico para rehabilitación de la extremidad superior derecha | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra. Ecuador. | es_EC |
| dc.identifier.mfn | 0000041637 | es_EC |
| Appears in Collections: | Ing. en Mecatrónica | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEC 489 logo.jpg | Logo | 285.77 kB | JPEG | 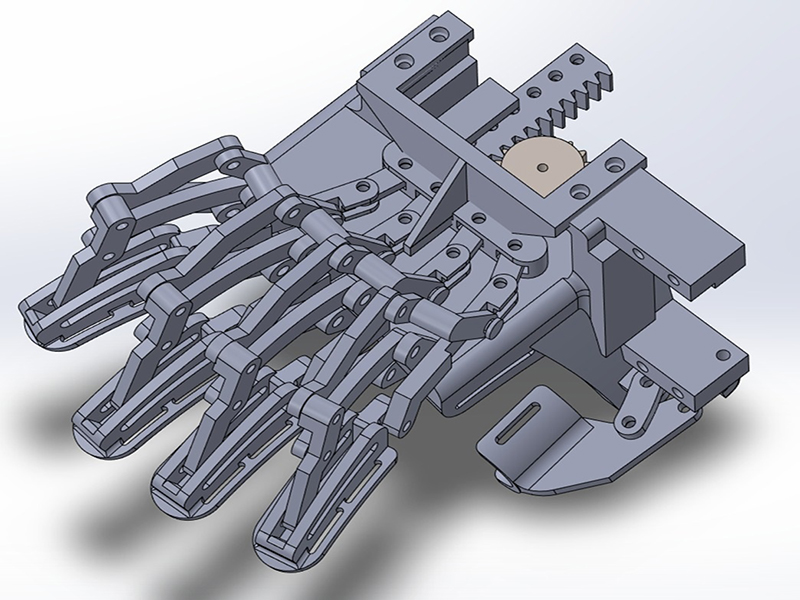 View/Open |
| 04 MEC 489 TRABAJO GRADO.pdf | Trabajo de Grado | 6.21 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

