
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/16272Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Ojeda Peña, David Alberto | - |
| dc.contributor.author | Rosero Rosero, Cristhian David | - |
| dc.date.accessioned | 2024-07-31T16:48:41Z | - |
| dc.date.available | 2024-07-31T16:48:41Z | - |
| dc.date.created | 2024-07-23 | - |
| dc.date.issued | 2024-07-31 | - |
| dc.identifier.other | 04/MEC/ 554 | es_EC |
| dc.identifier.uri | https://repositorio.utn.edu.ec/handle/123456789/16272 | - |
| dc.description | Desarrollar un robot teleoperado para la exploración de escombros por movimientos telúricos. | es_EC |
| dc.description.abstract | El presente trabajo de investigación se enfoca en el diseño y construcción de un robot teleoperado para la exploración de escombros ocasionados por movimientos telúricos, con el fin de brindar ayuda en operaciones de rescate. El desafío principal es la dificultad de acceder a sitios afectados por sismos donde el ingreso de grupos enfocados en búsqueda y rescate sea peligroso, lo cual es un punto clave para hallar personas que se encuentren aún con vida bajo los escombros, debido a que el tiempo es crucial para la vida del sobreviviente. El enfoque metodológico usado incluye el uso de diversos controladores como Raspberry Pi y Arduino, además una plataforma MQTT para la comunicación y una aplicación móvil para que el usuario controle el robot. Los resultados revelan que una conexión de red estable es clave para que el robot pueda dar un rendimiento pleno y sin interrupciones. Se identificó que el uso de una estructura de aluminio es la mejor opción gracias a su peso ligero y gran resistencia, el uso de una configuración diferencial apoyada de un sistema de locomoción por orugas es ideal para el desplazamiento en terrenos irregulares. El desarrollo de este tipo de robots es fundamental para las labores de rescate en entornos catastróficos donde el ingreso a lugares inestables sea un riesgo inminente para la vida de los equipos de rescate. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | ROBOTS | es_EC |
| dc.subject | EXPLORACIÓN FÍSICA | es_EC |
| dc.subject | SISMOS | es_EC |
| dc.title | Robot teleoperado para la exploración de escombros ocasionados por movimientos telúricos | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra, Ecuador | es_EC |
| dc.identifier.mfn | 0000043312 | es_EC |
| Appears in Collections: | Ing. en Mecatrónica | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEC 554 LOGO.jpg | LOGO | 52.99 kB | JPEG | 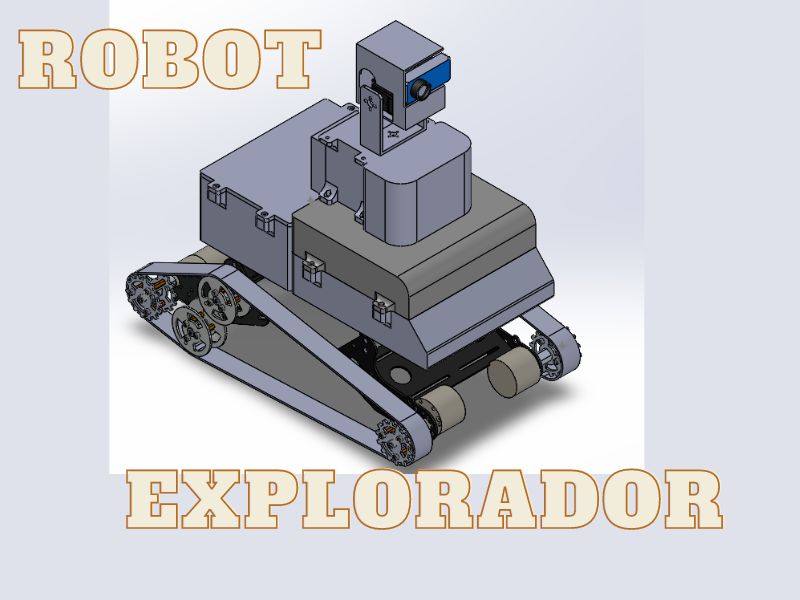 View/Open |
| 04 MEC 554 TRABAJO DE GRADO.pdf | TRABAJO DE GRADO | 14.65 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

