
|
|
Por favor, use este identificador para citar o enlazar este ítem:
https://repositorio.utn.edu.ec/handle/123456789/4608| Título : | Prototipo rehabilitador isocinético pasivo de rodilla |
| Director: | Valencia Aguirre, Fernando Vinicio |
| Autor : | Perugachi Perugachi, José Froilán |
| Tipo docuemento: | bachelorThesis |
| Palabras clave : | MECATRÓNICA;REHABILITADOR ISOCINÉTICO;REHABILITACIÓN DE RODILLA;REHABILITACIÓN POSTQUIRÚRGICA |
| Fecha de publicación : | 4-feb-2016 |
| Fecha de creación : | 13-oct-2015 |
| Resumen : | El presente trabajo trata sobre la rehabilitación postquirúrgica de rodilla, misma que representa un proceso largo y complejo para los pacientes debido a que presentan rigidez articular y se encuentran en un ciclo traumático, así como también, para el fisioterapeuta que la realiza ya que le resulta difícil proporcionar un movimiento pasivo continuo a la articulación y requiere que esta se efectúe de manera cuidadosa e inmediata a la operación. Para ello, se plantea tres propuestas de soluciones en base a los parámetros esperados en el dispositivo, posteriormente se selecciona el modelo que cumpla con los requerimientos establecidos. En base al método de elementos finitos se realiza el análisis de esfuerzo y desplazamiento, además se determina el factor de seguridad utilizando el software computacional Solidworks 2015, adicionalmente se efectúa el cálculo del torque necesario en el tornillo de potencia para elevar la carga. Seguido se efectúa la selección del microcontrolador, así como el actuador tomando en cuenta el torque calculado previamente. Además se diseña el controlador adecuado a implementarse, para determinar la estabilidad del sistema se realiza el modelamiento matemático, también se desarrolla el control de posición y velocidad. El prototipo rehabilitador isocinético pasivo de rodilla permite realizar movimientos de flexoextensión en amplitudes de ángulo entre 0° y 120°, número de repeticiones en un rango de 1 a 99, velocidad desde 60°/min hasta 110°/min y medidas antropométricas configurables de acuerdo al paciente. |
| Descripción : | Construir un prototipo rehabilitador isocinético pasivo de rodilla que permita realizar movimientos de flexión y extensión en la articulación. |
| URI : | http://repositorio.utn.edu.ec/handle/123456789/4608 |
| Ubicación: | 04/MEC/ 086 |
| Ciudad. País: | Ibarra. Ecuador. |
| Grado Académico: | Ingeniería |
| Carrera Profesional: | Mecatrónica |
| Aparece en las colecciones: | Ing. en Mecatrónica |
Ficheros en este ítem:
| Fichero | Descripción | Tamaño | Formato | |
|---|---|---|---|---|
| 04 MEC 086 TESIS.pdf | Documento Tesis | 5.6 MB | Adobe PDF |  Visualizar/Abrir |
| 04 MEC 086 INFORME TECNICO.pdf | Informe Técnico | 604.14 kB | Adobe PDF |  Visualizar/Abrir |
| 04 MEC 086 logo.jpg | Logo | 107.83 kB | JPEG | 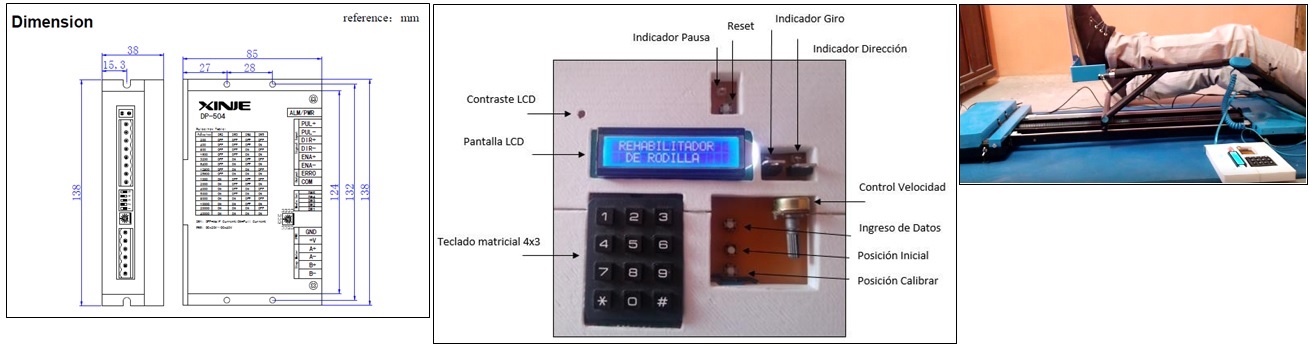 Visualizar/Abrir |
Este ítem está protegido por copyright original |
Este ítem está sujeto a una licencia Creative Commons Licencia Creative Commons

