
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/9555Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Verdezoto Carranco, Gabriela Alexandra | - |
| dc.contributor.author | Flores Taramuel, Ángelo Fernando | - |
| dc.date.accessioned | 2019-12-12T21:40:24Z | - |
| dc.date.available | 2019-12-12T21:40:24Z | - |
| dc.date.created | 2019-07-19 | - |
| dc.date.issued | 2019-12-12 | - |
| dc.identifier.other | 04/MEC/ 283 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/9555 | - |
| dc.description | Estimar la posición de la muñeca en los movimientos flexión-extensión y radial-cubital a través de señales electromiográficas. | es_EC |
| dc.description.abstract | El presente estudio, expone la estimación de posición de la muñeca a través de señales electromiográficas, para conseguir esto, se efectuó la selección de las posiciones angulares en los movimientos Flexión-Extensión y Abducción-Aducción, siendo la base principal para el desarrollo de esta investigación. Posteriormente, se eligieron los músculos de los que se extrajeron las señales mioeléctricas, de acuerdo con parámetros como el tamaño del músculo, la superficialidad y el aporte al movimiento en ejecución. Una vez definido un músculo de estudio por movimiento, se extrajeron muestras electromiográficas con la ayuda de tarjetas electrónicas y electrodos superficiales de Plata/Cloruro de Plata (Ag/AgCl). Posteriormente, se conformó una base de datos de cada movimiento constituido por 34 muestras, mismas que estaban integradas por 3 activaciones musculares. Conformada la base de datos, se realizó el procesamiento, acondicionamiento y digitalización de la señal; más adelante, se llevó a cabo el proceso de caracterización con análisis en el dominio del tiempo y frecuencia, de donde se obtuvo características particulares de la señal, que son de importancia para los clasificadores. Ulteriormente de obtener las características principales, se aplicó técnicas de aprendizaje de máquina, analizando la clasificación con varios algoritmos de tipo supervisados como Redes Neuronales, Maquinas de Soporte Vectorial, Análisis Discriminante, Nearest Neighbor y de tipo no supervisados como Clustering con la técnica Mapas de auto-organización (SOM); esto, con la finalidad de encontrar un clasificador óptimo que permita la identificación acertada del movimiento. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | MECATRÓNICA | es_EC |
| dc.subject | SEÑALES ELECTROMIOGRÁFICAS | es_EC |
| dc.subject | POSICIÓN DE LA MUÑECA | es_EC |
| dc.title | Estimación de posición de la muñeca a través de señales electromiográficas | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra. Ecuador. | es_EC |
| dc.identifier.mfn | 0000030327 | es_EC |
| Appears in Collections: | Ing. en Mecatrónica | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEC 283 logo.jpg | Logo | 210.68 kB | JPEG | 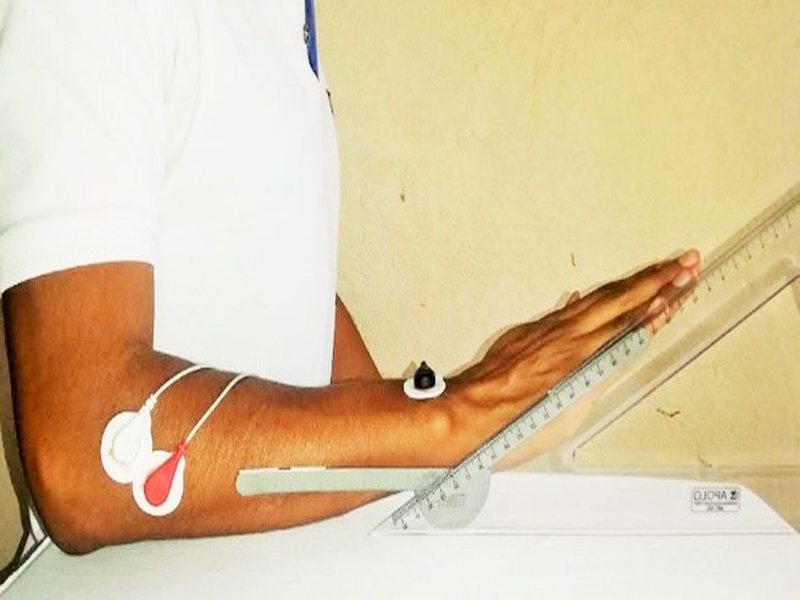 View/Open |
| 04 MEC 283 TRABAJO GRADO.pdf | Trabajo de Grado | 6.71 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

