
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/11289Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Naranjo Cobo, Francisco Roberto | - |
| dc.contributor.author | Carlosama Fauta, Galo Israel | - |
| dc.date.accessioned | 2021-07-16T17:21:54Z | - |
| dc.date.available | 2021-07-16T17:21:54Z | - |
| dc.date.created | 2021-06-30 | - |
| dc.date.issued | 2021-07-16 | - |
| dc.identifier.other | 04/MEL/ 116 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/11289 | - |
| dc.description | Implementar un prototipo de vehículo terrestre no tripulado autónomo. | es_EC |
| dc.description.abstract | El desarrollo de nuevas tecnologías autónomas está diseñado para cumplir determinadas aplicaciones entre ellas exploración espacial, espionaje, búsqueda y rescate, además de diferenciarse por la variedad de diseños y así resolver los problemas que aquejan al mundo como desastres naturales que dan lugar a que se extravíen personas y no se logre una búsqueda eficiente. El objetivo de esta investigación es la implementación de un prototipo de vehículo terrestre no tripulado autónomo utilizando la metodología del diseño de la función de calidad el cual permite la selección de materiales de acuerdo a las necesidades requeridas por el usuario, con el fin de realizar un diseño electrónico que da lugar a la implementación, así realizando pruebas y ajuste de funcionalidad en donde se obtiene que los vehículos autónomos sofisticados son costosos pero también puede ser implementado con tecnologías de menor gama y cumplir con los requerimientos mínimos, ya que entre más componentes electrónicos se incluya mayor recursos se requerirá en el controlador, de la misma forma sucede con la comunicación, transmisión y recepción de información entre más área de cobertura se quiera alcanzar mayor potencia de transmisión es necesaria. El vehículo terrestre no tripulado autónomo transita por superficies planas, inclinadas y semiplanas en las que por medio de los sensores esquiva obstáculos y se dirige de manera autónoma a una o varias coordenadas declaradas como latitud y longitud. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | ELECTRICIDAD | es_EC |
| dc.subject | VEHÍCULO | es_EC |
| dc.subject | TELEDETECCIÓN | es_EC |
| dc.subject | TELECOMUNICACIÓN | es_EC |
| dc.title | Implementación de un prototipo de vehículo terrestre no tripulado autónomo | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mantenimiento Eléctrico | es_EC |
| dc.coverage | Ibarra. Ecuador. | es_EC |
| dc.identifier.mfn | 0000034819 | es_EC |
| Appears in Collections: | Ing. en Mantenimiento Eléctrico | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEL 116 logo.jpg | Logo | 163.54 kB | JPEG | 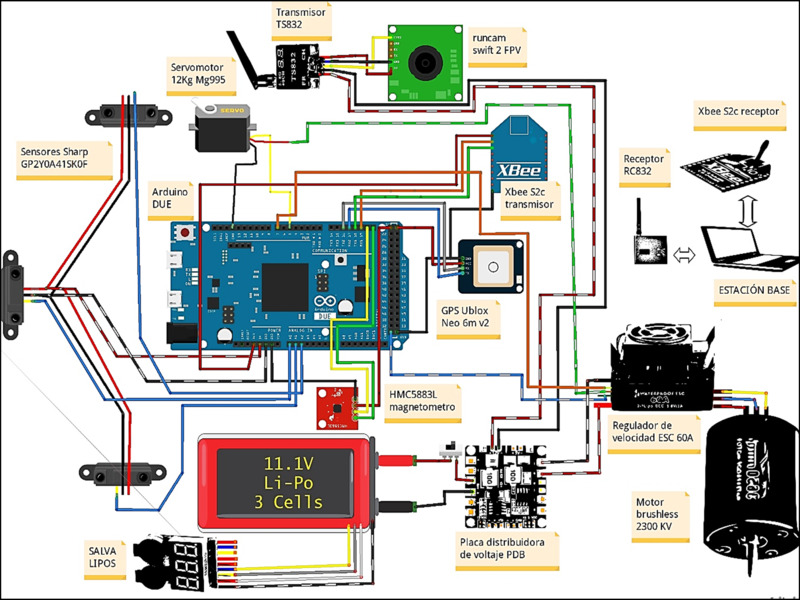 View/Open |
| 04 MEL 116 TRABAJO GRADO.pdf | Trabajo de Grado | 6.1 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

