
|
|
Por favor, use este identificador para citar o enlazar este ítem:
https://repositorio.utn.edu.ec/handle/123456789/11512Registro completo de metadatos
| Campo DC | Valor | Lengua/Idioma |
|---|---|---|
| dc.contributor.advisor | Ormeño Mejía, Eliana Carolina | - |
| dc.contributor.author | Bonilla Andrade, Danny Sebastián | - |
| dc.date.accessioned | 2021-09-30T21:23:35Z | - |
| dc.date.available | 2021-09-30T21:23:35Z | - |
| dc.date.created | 2021-09-20 | - |
| dc.date.issued | 2021-09-30 | - |
| dc.identifier.other | 04/MEL/ 119 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/11512 | - |
| dc.description | Implementar controladores PID y por espacios de estados, codificados en un software especializado, integrados a un sistema dinámico mediante la utilización de un PLC para la adquisición de datos y variables de estado en tiempo real. | es_EC |
| dc.description.abstract | El presente trabajo de grado se basa en aplicaciones para el uso de diferentes tipos de control, mediante los cuales se pueden realizar prácticas de laboratorio orientadas a sistemas dinámicos de nivel, presión y caudal en la carrera de Electricidad. Esta tesis se la realizó con el fin de Implementar controladores PID y por espacios de estados, codificados en un software especializado integrados a sistemas dinámicos mediante la utilización de un PLC para la adquisición de datos y variables de estado en tiempo real, con los cuales se dio a conocer la configuración de comunicaciones OPC, la identificación de sistemas, el control y monitoreo de variables que conforman cada uno de los sistemas de nivel, presión y caudal, que, a partir de un estudio de métodos y técnicas de control se llegó a su diseño e implementación, los cuales contribuyen al aprendizaje y la formación de conocimientos sobre los sistemas de control PID y realimentación de estados. A este trabajo de investigación se lo complementa con un análisis comparativo entre los controladores PID y por realimentación de estados. Las pruebas de funcionamiento y experimentos realizados determinan el tiempo de estabilización, el máximo pico de sobre impulso y el error de estado estable en cada sistema, los cuales muestran un desempeño del 90% para el controlador PID en sistemas no lineales y un 98%% para sistemas lineales, a diferencia de los controladores por realimentación de estados, estos tienen un desempeño al 50% en sistemas no lineales y un desempeño al 100% en sistemas lineales. Además, se realizó un manual técnico para prácticas de control PID y por realimentación de estados aplicados a las variables de nivel, presión y caudal. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | ELECTRICIDAD | es_EC |
| dc.subject | RED DE TELECOMUNICACIONES | es_EC |
| dc.subject | CONTROLADORES PID | es_EC |
| dc.title | Implementación de controladores PID y por espacios de estados, integrados a un sistema dinámico real | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mantenimiento Eléctrico | es_EC |
| dc.coverage | Ibarra. Ecuador. | es_EC |
| dc.identifier.mfn | 0000035390 | es_EC |
| Aparece en las colecciones: | Ing. en Mantenimiento Eléctrico | |
Ficheros en este ítem:
| Fichero | Descripción | Tamaño | Formato | |
|---|---|---|---|---|
| 04 MEL 119 LOGO.jpg | Logo | 49.33 kB | JPEG | 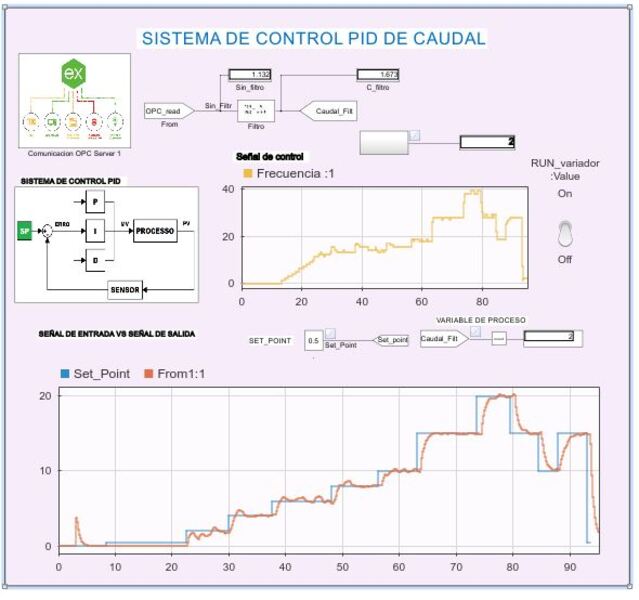 Visualizar/Abrir |
| 04 MEL 119 TRABAJO GRADO.pdf | Trabajo de Grado | 6.25 MB | Adobe PDF |  Visualizar/Abrir |
Este ítem está protegido por copyright original |
Este ítem está sujeto a una licencia Creative Commons Licencia Creative Commons

