
|
|
Por favor, use este identificador para citar o enlazar este ítem:
https://repositorio.utn.edu.ec/handle/123456789/14516Registro completo de metadatos
| Campo DC | Valor | Lengua/Idioma |
|---|---|---|
| dc.contributor.advisor | Rosero Chandi, Carlos Xavier | - |
| dc.contributor.author | Borrallos Pérez, Anderson Steeven | - |
| dc.date.accessioned | 2023-07-31T21:03:40Z | - |
| dc.date.available | 2023-07-31T21:03:40Z | - |
| dc.date.created | 2023-07-04 | - |
| dc.date.issued | 2023-07-31 | - |
| dc.identifier.other | 04/MEC/ 480 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/14516 | - |
| dc.description | Desarrollar una máquina de estados finitos para un robot seguidor de línea controlado en lazo cerrado. | es_EC |
| dc.description.abstract | La tecnología de robots móviles autónomos se ha actualizado para operar en áreas con escasa infraestructura ferroviaria, especialmente en industrias. Los robots seguidores de línea se utilizan en servicios de atención médica y otras aplicaciones de transporte o movimiento, por tanto, se busca mejorar su eficiencia en el control. Estos robots presentan problemas en cuanto a su escalabilidad y capacidad para corregir errores en una trayectoria marcada. Además, carecen de orden y análisis en su funcionamiento. Por esta razón, se utilizan sistemas de control en lazo cerrado en sus sensores o actuadores para controlar su desplazamiento y velocidad de forma simultánea y asegurar un rendimiento óptimo del robot en diferentes situaciones de trabajo. Con este fin, se desarrolló una metodología basada en una técnica robusta llamada máquina de estados finitos (FSM) que permitió separar el comportamiento del robot en diferentes situaciones mediante la definición de estados, eventos y acciones de control. Asimismo, se incluyó un algoritmo que utiliza cinco estados:” Parado”,” Avance”,” Giros”,” Retroceso” y” Fin”, junto al me ‘todo de modulación por ancho de pulso (PWM) para controlar la velocidad y ejecutar una acción de control específica para cada estado. La arquitectura del robot que se utiliza es diferencial y se compone de cuatro sensores infrarrojos y dos actuadores. Por último, se desarrolló un código de programación organizado que facilitó la depuración de errores de lógica y la puesta en marcha del robot. En las pruebas realizadas, se utiliza dos escenarios uno normal y uno complejo que tienen un inicio y un fin. Al analizar las pistas por tramos, se obtuvieron diversos resultados en términos de estabilidad, fluidez, tiempo de recorrido y velocidad. Estas pruebas demostraron un control altamente exitoso del robot seguidor de línea. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | ROBÓTICA | es_EC |
| dc.subject | AUTÓMATAS | es_EC |
| dc.subject | PROGRAMACIÓN | es_EC |
| dc.title | Máquina de estados finitos para control de un robot seguidor de línea | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra. Ecuador. | es_EC |
| dc.identifier.mfn | 0000041557 | es_EC |
| Aparece en las colecciones: | Ing. en Mecatrónica | |
Ficheros en este ítem:
| Fichero | Descripción | Tamaño | Formato | |
|---|---|---|---|---|
| 04 MEC 480 logo.jpg | Logo | 48.45 kB | JPEG | 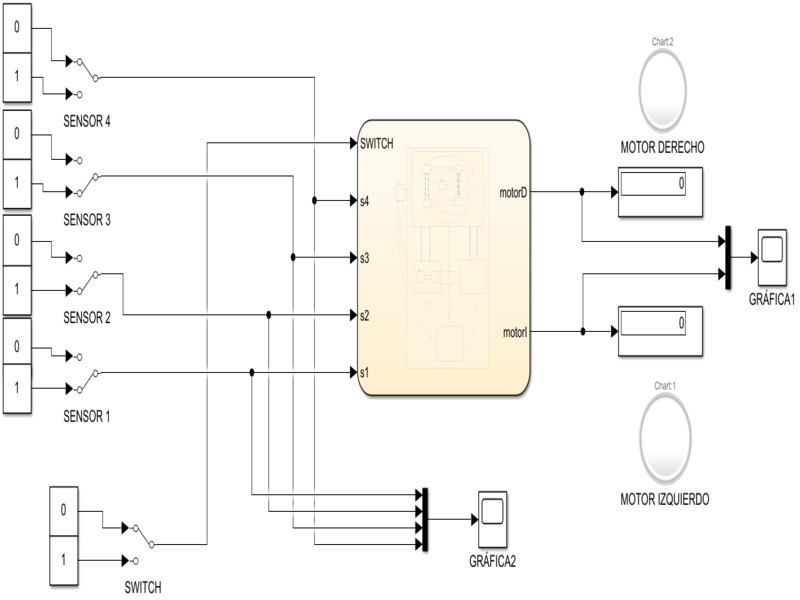 Visualizar/Abrir |
| 04 MEC 480 TRABAJO GRADO.pdf | Trabajo de Grado | 10.11 MB | Adobe PDF |  Visualizar/Abrir |
Este ítem está protegido por copyright original |
Este ítem está sujeto a una licencia Creative Commons Licencia Creative Commons

