
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/14821Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Pusdá Chulde, Marco Remigio | - |
| dc.contributor.author | Escobar Molina, Mónica Cristina | - |
| dc.date.accessioned | 2023-09-22T20:29:09Z | - |
| dc.date.available | 2023-09-22T20:29:09Z | - |
| dc.date.created | 2023-09-11 | - |
| dc.date.issued | 2023-09-22 | - |
| dc.identifier.other | 04/ISC/ 694 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/14821 | - |
| dc.description | Comparar las Plataformas Raspberry Pi 4 y Jetson Nano en aplicaciones de agricultura de precisión. | es_EC |
| dc.description.abstract | El objetivo de esta comparativa es investigar las capacidades de las plataformas Raspberry Pi 4 y Jetson Nano para su uso en aplicaciones de agricultura de precisión. El propósito es evaluar si estas arquitecturas de hardware son adecuadas para el procesamiento de imágenes agrícolas en la automatización de tareas relacionadas con la agricultura. Después de realizar una revisión exhaustiva de la literatura y llevar a cabo un análisis, se determinó que la computadora Jetson Nano era la opción más idónea para desarrollar e implementar un algoritmo destinado a la detección de líneas en cultivos de maíz. Esto se basó en su ventaja en términos de detección de objetos y procesamiento de imágenes, lo que permitiría lograr una mayor eficiencia, reducir el tiempo de ejecución y el consumo de recursos como memoria y CPU. Además, esta elección proporcionaría un mejor reconocimiento y clasificación de las líneas y malezas en los cultivos, con mayor precisión y velocidad, anticipando la toma de medidas para controlar su propagación. Una vez que se implementó la aplicación, se llevaron a cabo evaluaciones de rendimiento del algoritmo utilizando un conjunto de imágenes adquiridas previamente con un dron. Los resultados mostraron una detección precisa de las líneas en los cultivos a alturas de 10 y 15 metros durante las semanas 3 y 4, superando el 90%. Además, se logró una reducción significativa en el tiempo de ejecución para la localización y un aumento en el porcentaje de reconocimiento de líneas en los cultivos de maíz, alcanzando una precisión superior al 85%. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | SISTEMA INFORMÁTICO | es_EC |
| dc.subject | SISTEMA DE INFORMACIÓN AGRÍCOLA | es_EC |
| dc.subject | AGRICULTURA DE PRECISIÓN | es_EC |
| dc.title | Comparativa de plataformas Raspberry PI 4 y Jetson Nano para aplicaciones de agricultura de precisión | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Sistemas Computacionales | es_EC |
| dc.coverage | Ibarra. Ecuador. | es_EC |
| dc.identifier.mfn | 0000041867 | es_EC |
| Appears in Collections: | Ing. en Sistemas Computacionales | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 ISC 694 logo.jpg | Logo | 151.14 kB | JPEG | 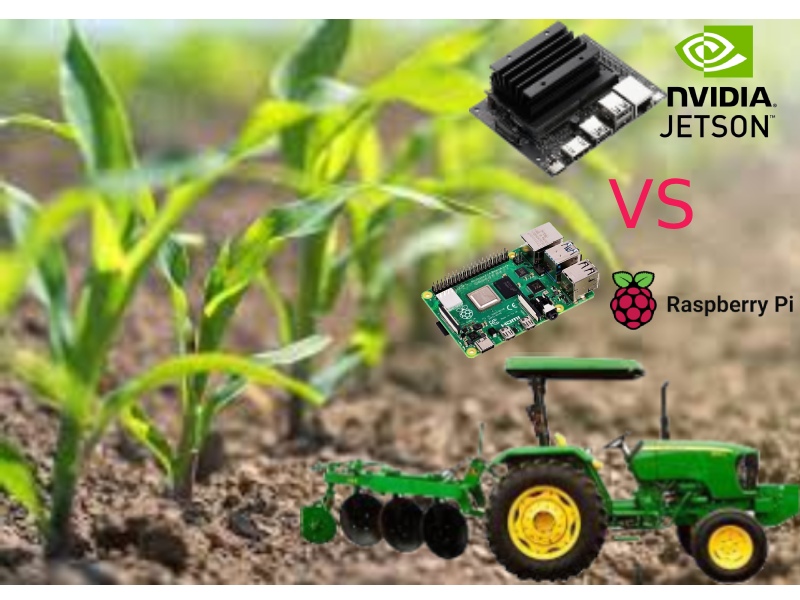 View/Open |
| 04 ISC 694 TRABAJO GRADO.pdf | Trabajo de Grado | 2.21 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

