
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/9041| Title: | Control de velocidad de un robot móvil con dirección diferencial |
| metadata.dc.contributor.advisor: | Rosero Chandi, Carlos Xavier |
| Authors: | Fernández Cruz, Gabriel Andrés |
| metadata.dc.type: | bachelorThesis |
| Keywords: | CONTROL DE VELOCIDAD DE UN ROBOT MÓVIL CON DIRECCIÓN DIFERENCIAL |
| Issue Date: | 5-Apr-2019 |
| metadata.dc.date.created: | 2019 |
| Abstract: | Los robots móviles son sistemas electromecánicos capaces de desplazarse de forma autónoma. En los últimos años su estudio ha ido en aumento, proporcionando avances tecnológicos de hardware y software, muchos de ellos usados dentro del proceso de enseñanza-aprendizaje. Particularmente en la Universidad Técnica del Norte existe un robot móvil, el cual está construido con hardware y software existente en la Universidad. Este posee motores acoplados a llantas, colocados en configuración diferencial para mejorar el desplazamiento y rotación. Además, se cuenta con un sistema de medición basado en codificadores incrementales utilizados para la odometría. Para el control y adquisición de datos en tiempo real se usa un sistema embebido sbRIO 9631. El control de velocidad implementado está en lazo abierto, lo que no proporciona un desempeño eficiente. El presente trabajo propone implementar un control de velocidad en lazo cerrado. Para desarrollar el controlador se realiza un modelado matemático siguiendo el método de Cecil-Smith, además se realiza una identificación con el software MatLab. El control se diseña considerando: mayor estabilidad del sistema, reducción de sobre impulso, facilidad de implementar, para lo cual se realiza una comparación entre distintos métodos de diseño de controladores. Además, se realiza simulaciones del controlador y la planta en lazo cerrado mediante el software MatLab, para comprobar su desempeño. Una interfaz gráfica se desarrolla en el software LabView que permite manipular variables del controlador y observar las señales de los sensores a través de indicadores fáciles de interpretar. Las pruebas del controlador se realizan en distintas condiciones, con el fin de comprobar su correcto funcionamiento. Como resultado el controlador cumple con las especificaciones de desempeño consideradas en el diseño. |
| Description: | • Mfn0000028003 • Codigo04/MEC/ 249 • TituloCONTROL DE VELOCIDAD DE UN ROBOT MÓVIL CON DIRECCIÓN DIFERENCIAL • Autores Fernández Cruz, Gabriel Andrés • Anio2019 • CarreraIngeniería en Mecatrónica • Director Rosero Chandi Carlos Xavier • Descripcion FisicaPaginas: 84/ Inf. Descriptiva: ilus. • ResumenLos robots móviles son sistemas electromecánicos capaces de desplazarse de forma autónoma. En los últimos años su estudio ha ido en aumento, proporcionando avances tecnológicos de hardware y software, muchos de ellos usados dentro del proceso de enseñanza-aprendizaje. Particularmente en la Universidad Técnica del Norte existe un robot móvil, el cual está construido con hardware y software existente en la Universidad. Este posee motores acoplados a llantas, colocados en configuración diferencial para mejorar el desplazamiento y rotación. Además, se cuenta con un sistema de medición basado en codificadores incrementales utilizados para la odometría. Para el control y adquisición de datos en tiempo real se usa un sistema embebido sbRIO 9631. El control de velocidad implementado está en lazo abierto, lo que no proporciona un desempeño eficiente. El presente trabajo propone implementar un control de velocidad en lazo cerrado. Para desarrollar el controlador se realiza un modelado matemático siguiendo el método de Cecil-Smith, además se realiza una identificación con el software MatLab. El control se diseña considerando: mayor estabilidad del sistema, reducción de sobre impulso, facilidad de implementar, para lo cual se realiza una comparación entre distintos métodos de diseño de controladores. Además, se realiza simulaciones del controlador y la planta en lazo cerrado mediante el software MatLab, para comprobar su desempeño. Una interfaz gráfica se desarrolla en el software LabView que permite manipular variables del controlador y observar las señales de los sensores a través de indicadores fáciles de interpretar. Las pruebas del controlador se realizan en distintas condiciones, con el fin de comprobar su correcto funcionamiento. Como resultado el controlador cumple con las especificaciones de desempeño consideradas en el diseño. |
| URI: | http://repositorio.utn.edu.ec/handle/123456789/9041 |
| metadata.dc.identifier.other: | 04/MEC/ 249 |
| metadata.dc.coverage: | Imbabura. Ecuador |
| metadata.dc.identifier.mfn: | 0000028003 |
| metadata.dc.contributor.deparment: | Ingeniería en Mecatrónica |
| Appears in Collections: | Ing. en Mecatrónica |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEC 249 TRABAJO DE GRADO.pdf | 22.6 MB | Adobe PDF |  View/Open | |
| IMAGEN.jpg | Imagen | 315.71 kB | JPEG | 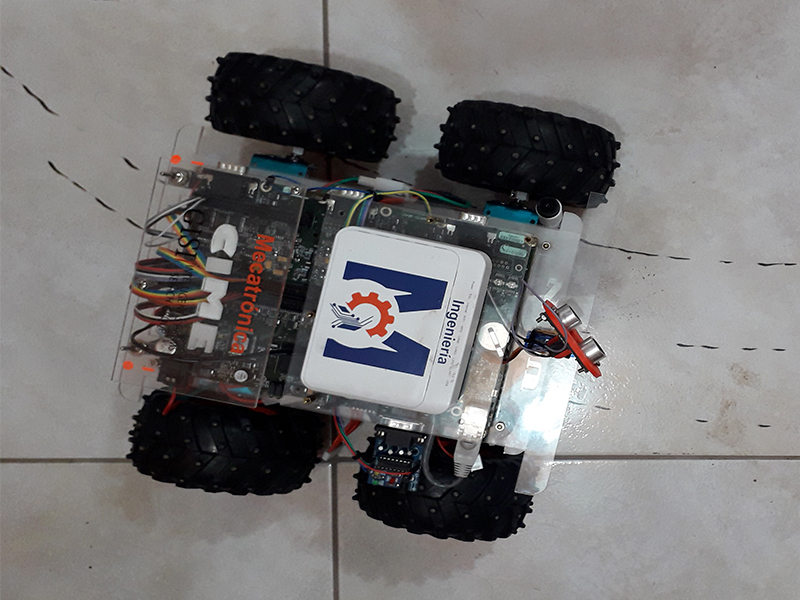 View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

