
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/14098Full metadata record
| DC Field | Value | Language |
|---|---|---|
| dc.contributor.advisor | Naranjo Cobo, Francisco Roberto | - |
| dc.contributor.author | Albuja Pozo, Joseph Sebastián | - |
| dc.date.accessioned | 2023-06-16T21:03:36Z | - |
| dc.date.available | 2023-06-16T21:03:36Z | - |
| dc.date.created | 2023-05-30 | - |
| dc.date.issued | 2023-06-16 | - |
| dc.identifier.other | 04/MEL/ 208 | es_EC |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/14098 | - |
| dc.description | Implementar un guante háptico con retroalimentación de fuerza controlado a través de un exoesqueleto automatizado por hardware para la operación de un vehículo no tripulado. | es_EC |
| dc.description.abstract | El objetivo de esta investigación es la implementación de un guante háptico con retroalimentación de fuerza utilizando la metodología en espiral la cual permite seguir un proceso ordenado e interactuar con los mejores procesos para obtener los mejores resultados, así realizando pruebas y ajuste de diseños existentes en donde se obtiene que los guantes hápticos comerciales se pueden comunicar en un entorno virtual, pero también pueden ser implementados con tecnologías de acción y reacción con las personas como el manejo de vehículos electrónicos, que tiene un costo menor a los guantes de comunicación con entornos virtuales, pero cumple con los requerimientos de la háptica en la actualidad. El guante háptico con retroalimentación de fuerza maneja un pequeño vehículo no tripulado que por medio de los sensores permite al usuario percibir y sentir mediante acciones y vibraciones los obstáculos que se presentan en el campo de manejo, todo esto dirigido a la mano derecha de la persona. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.rights | Atribución-NoComercial-CompartirIgual 3.0 Ecuador | * |
| dc.rights.uri | http://creativecommons.org/licenses/by-nc-sa/3.0/ec/ | * |
| dc.subject | INTERFAZ HÁPTICA | es_EC |
| dc.subject | RETROALIMENTACIÓN DE FUERZA | es_EC |
| dc.subject | ENTORNO VIRTUAL | es_EC |
| dc.subject | APLICACIONES TECNOLÓGICAS | es_EC |
| dc.subject | CONDUCCIÓN DE VEHÍCULOS | es_EC |
| dc.title | Implementación de un guante háptico con retroalimentación de fuerza | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mantenimiento Eléctrico | es_EC |
| dc.coverage | Ibarra. Ecuador | es_EC |
| dc.identifier.mfn | 0000041243 | es_EC |
| Appears in Collections: | Ing. en Mantenimiento Eléctrico | |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 MEL 208 LOGO.jpg | Logo | 59.83 kB | JPEG | 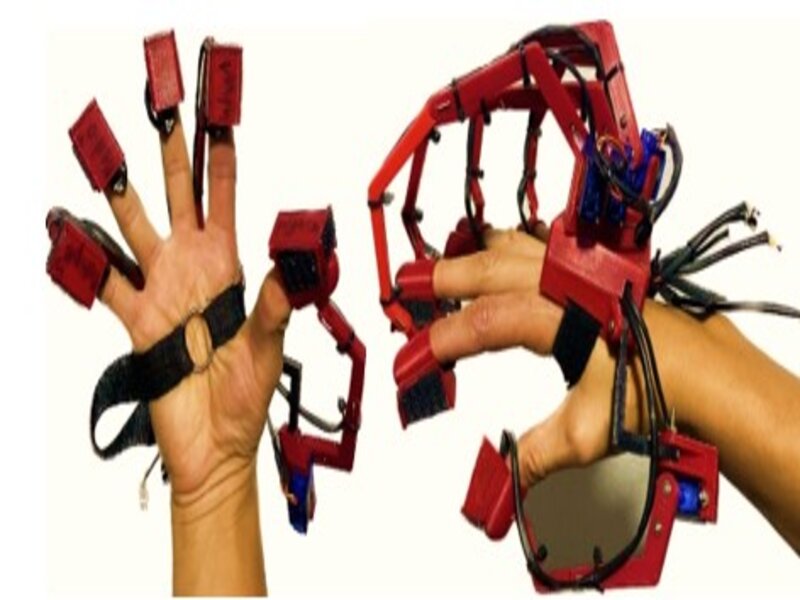 View/Open |
| 04 MEL 208 TRABAJO DE GRADO.pdf | Trabajo de grado | 6.23 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

