
|
|
Por favor, use este identificador para citar o enlazar este ítem:
https://repositorio.utn.edu.ec/handle/123456789/4601Registro completo de metadatos
| Campo DC | Valor | Lengua/Idioma |
|---|---|---|
| dc.contributor.advisor | Obando Villarreal, Carlos Andrés | - |
| dc.contributor.author | Guijarro Revelo, Jessica Karina | - |
| dc.contributor.author | Alta Andrango, Andrés Marcelo | - |
| dc.date.accessioned | 2016-02-02T16:33:41Z | - |
| dc.date.available | 2016-02-02T16:33:41Z | - |
| dc.date.created | 2015-03-30 | - |
| dc.date.issued | 2016-02-02 | - |
| dc.identifier.other | 04/MEC/ 080 | es_EC |
| dc.identifier.other | 0000017139 | - |
| dc.identifier.uri | http://repositorio.utn.edu.ec/handle/123456789/4601 | - |
| dc.description | Una silla de ruedas automática guiada a través de comandos de voz permitirá un mayor grado de autonomía en lo que a movilidad de personas con condiciones físicas diferentes se refiere, comandarla será bastante fácil y no requerirá de ningún esfuerzo físico ni de la asistencia de otra persona; permitiéndole al usuario movilizarse a donde él necesite; además provocará un gran impacto social puesto que no solo facilitará la vida de la persona limitada en sus capacidades sino también la de las personas que están a su alrededor. Este implemento será de gran ayuda para las personas cuadripléjicas y también parapléjicas, ancianos, niños con pci (parálisis cerebral infantil), etc., brindándoles a todos ellos mucha mayor facilidad y comodidad. | es_EC |
| dc.description.abstract | Existen discapacidades motoras que limitan el desplazamiento de las personas que las poseen, este es el caso de la cuadriplejía, que impide cualquier movimiento de las extremidades tanto inferiores como superiores y por ende la manipulación y control clásico de dispositivos como la silla de ruedas, relegando a la persona a una dependencia total para la realización de los más simples procesos de desplazamiento y a un decaimiento emocional por la incapacidad sostenida, problema que a la vez afecta también a todos sus familiares. En el Ecuador, actualmente, existen sillas de ruedas comandadas por botones o joysticks que ayudan a ciertos discapacitados, pero estas no brindan una solución total para las personas cuadripléjicas ya que el único movimiento posible para ellas es el de la cabeza por tanto no pueden comandar este tipo de sillas y siguen dependiendo de otra persona para movilizarse. Este proyecto consiste en la implementación de un sistema de control por comandos de voz para una silla de ruedas convencional con sensores de proximidad que paralizarán totalmente la silla ante la presencia cercana de algún obstáculo, permitiendo de esta manera al beneficiario, desplazarse con autonomía y comodidad en una superficie plana con 360 grados de giro de libertad; comandarla será bastante fácil y no requerirá de ningún esfuerzo físico ni de la asistencia de otra persona; permitiéndole al discapacitado movilizarse a donde él necesite. Este implemento será de gran ayuda para las personas cuadripléjicas y también parapléjicas, ancianos, niños con pci (parálisis cerebral infantil), etc., brindándoles a todos ellos mucha mayor facilidad y comodidad, aportando de esta manera también a todas las personas que los rodean. | es_EC |
| dc.language.iso | spa | es_EC |
| dc.rights | openAccess | es_EC |
| dc.subject | MECATRÓNICA | es_EC |
| dc.subject | SILLA DE RUEDAS CON COMANDOS DE VOZ | es_EC |
| dc.subject | COMANDOS DE VOZ | es_EC |
| dc.subject | DISCAPACIDADES MOTORAS | es_EC |
| dc.subject | SENSORES ULTRASÓNICOS | es_EC |
| dc.title | Diseño e implementación de un control por comandos de voz a una silla de ruedas | es_EC |
| dc.type | bachelorThesis | es_EC |
| dc.description.degree | Ingeniería | es_EC |
| dc.contributor.deparment | Mecatrónica | es_EC |
| dc.coverage | Ibarra. Ecuador. | es_EC |
| Aparece en las colecciones: | Ing. en Mecatrónica | |
Ficheros en este ítem:
| Fichero | Descripción | Tamaño | Formato | |
|---|---|---|---|---|
| 04 MEC 080 TESIS.pdf | Documento Tesis | 4,14 MB | Adobe PDF |  Visualizar/Abrir |
| 04 MEC 080 ARTICULO PERIODISTICO.pdf | Artículo Periodístico | 471,08 kB | Adobe PDF |  Visualizar/Abrir |
| 04 MEC 080 MANUAL DE MANTENIMIENTO.pdf | Manual de Mantenimiento | 364,44 kB | Adobe PDF |  Visualizar/Abrir |
| 04 MEC 080 MANUAL DEL USUARIO.pdf | Manual de Usuario | 467,42 kB | Adobe PDF |  Visualizar/Abrir |
| 04 MEC 080 TECHNICAL REPORT.pdf | Technical Report | 477,1 kB | Adobe PDF |  Visualizar/Abrir |
| 04 MEC 080 logo.jpg | Logo | 208,41 kB | JPEG | 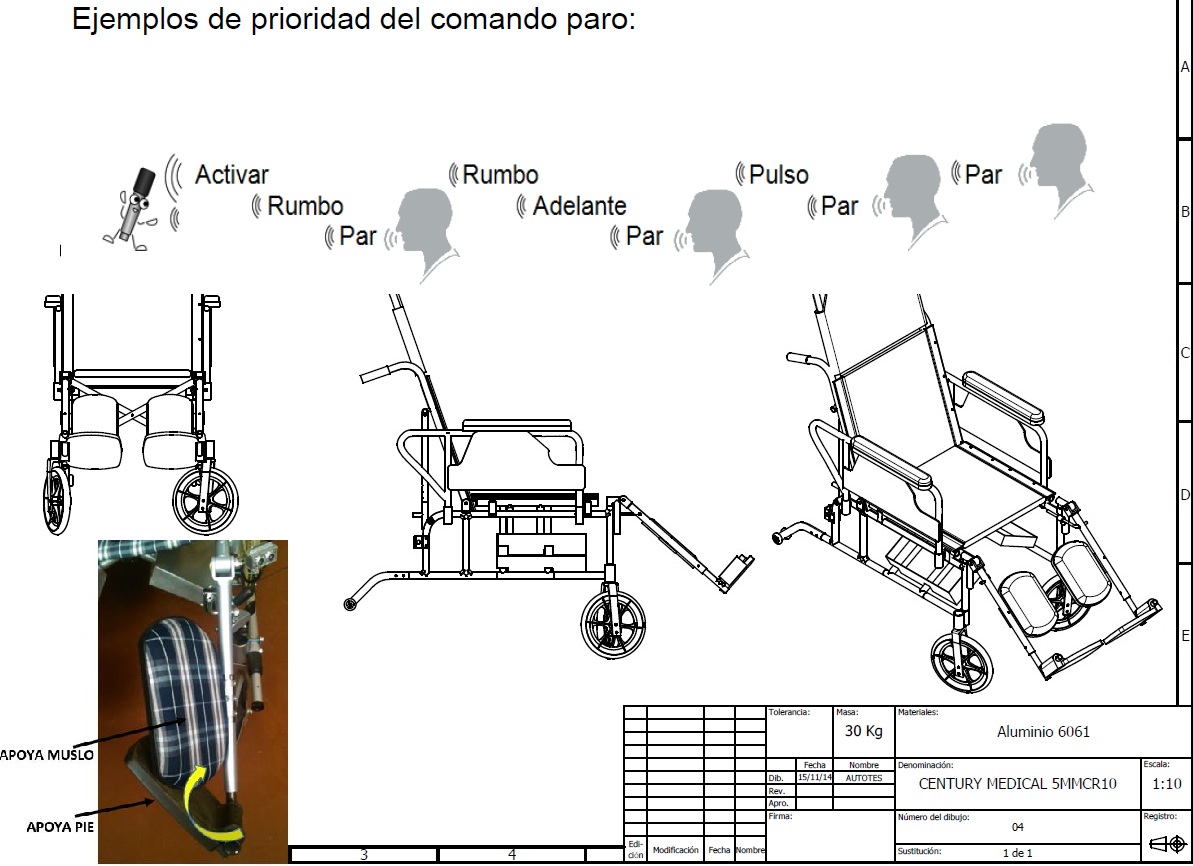 Visualizar/Abrir |
Este ítem está protegido por copyright original |
Este ítem está sujeto a una licencia Creative Commons Licencia Creative Commons

