
|
|
Please use this identifier to cite or link to this item:
https://repositorio.utn.edu.ec/handle/123456789/14975| Title: | Elaboración de una red multiplexada can en base a microcontroladores arduino para el control de sistemas embebidos automotrices |
| metadata.dc.contributor.advisor: | Rosero Añazco, Ramiro Andrés |
| Authors: | Huera Lomas, Jefferson Javier |
| metadata.dc.type: | bachelorThesis |
| Keywords: | AUTOMOTOR;CIRCUITOS ELECTRONICOS |
| Issue Date: | 18-Oct-2023 |
| metadata.dc.date.created: | 28-Sep-2023 |
| Abstract: | La finalidad del presente trabajo de investigación es elaborar una red multiplexada CAN en base a microcontroladores Arduino, con la capacidad de controlar sistemas embebidos automotrices. Para ello, se diseñó un sistema multiplexado con 4 módulos sustentado en una configuración CAN-BUS, dichos módulos se constituyeron por placas CAN Bus Shield y Arduinos Mega 2560, mismos que al ensamblarlos y puentear los pines SPI (SCK, MOSI y MISO) son compatibles con la norma ISO 11898, por contar con el controlador MCP2515, transceptor TJA1050 y microprocesador Atmega2560. Luego, se desarrolló la lógica de programación empleando el software Arduino (IDE), estableciendo inicialmente una comunicación unidireccional para familiarizarse con el uso de las librerías SPI.h y mcp2515_can.h, y luego una comunicación bidireccional paulatina bajo el principio multidifusión, con los parámetros comunes de velocidad a 1 Mbit/s y formato extendido. La cual, se reduce al rango de 500 Kbits/s por la operación de la placa CAN Bus Shield a 8 MHz, generando que el tiempo de transmisión de una trama sea el doble del número de bits que la conforman, pero en microsegundos. En donde, se identificó fluctuaciones en los periodos de transmisión y counter, los cuales se controlaron implementando un Timer, con capacidad de ajustar dichos periodos hasta 5 ms. Seguidamente, se elaboró el sistema general de la red, el cual se conformó por componentes automotrices y compatibles a Arduino, para simular principalmente el funcionamiento de subsistemas de control de la carrocería, como: las luces de cruce, carretera, direccionales, emergencia, antiniebla, posición, freno y retroceso, en conjunto con la alerta acústica de proximidad y el sistema limpiaparabrisas, integrado con funcionalidad automática al igual que las luces adaptativas de carretera y selectivas antiniebla delanteras, además de subsistemas también relacionados con la seguridad activa, como las luces automáticas de la cabina, claxon, y como algo complementario un motor DC. |
| Description: | Elaborar una red multiplexada CAN en base a microcontroladores Arduino para el control de sistemas embebidos automotrices. |
| URI: | http://repositorio.utn.edu.ec/handle/123456789/14975 |
| metadata.dc.identifier.other: | 04/AUT/ 011 |
| metadata.dc.coverage: | Ibarra. Ecuador. |
| metadata.dc.description.degree: | Ingeniería |
| metadata.dc.identifier.mfn: | 0000042038 |
| metadata.dc.contributor.deparment: | Automotriz |
| Appears in Collections: | Automotriz |
Files in This Item:
| File | Description | Size | Format | |
|---|---|---|---|---|
| 04 AUT 011 logo.jpg | Logo | 128.7 kB | JPEG | 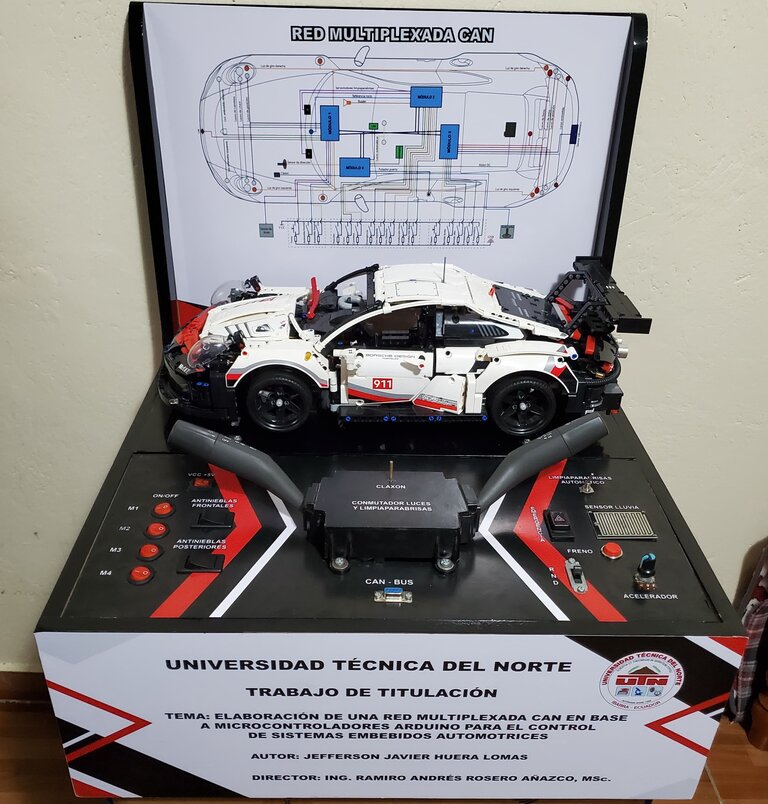 View/Open |
| 04 AUT 011 TRABAJO GRADO.pdf | Trabajo de Grado | 8.38 MB | Adobe PDF |  View/Open |
This item is protected by original copyright |
This item is licensed under a Creative Commons License

